
 Nederlands
Nederlands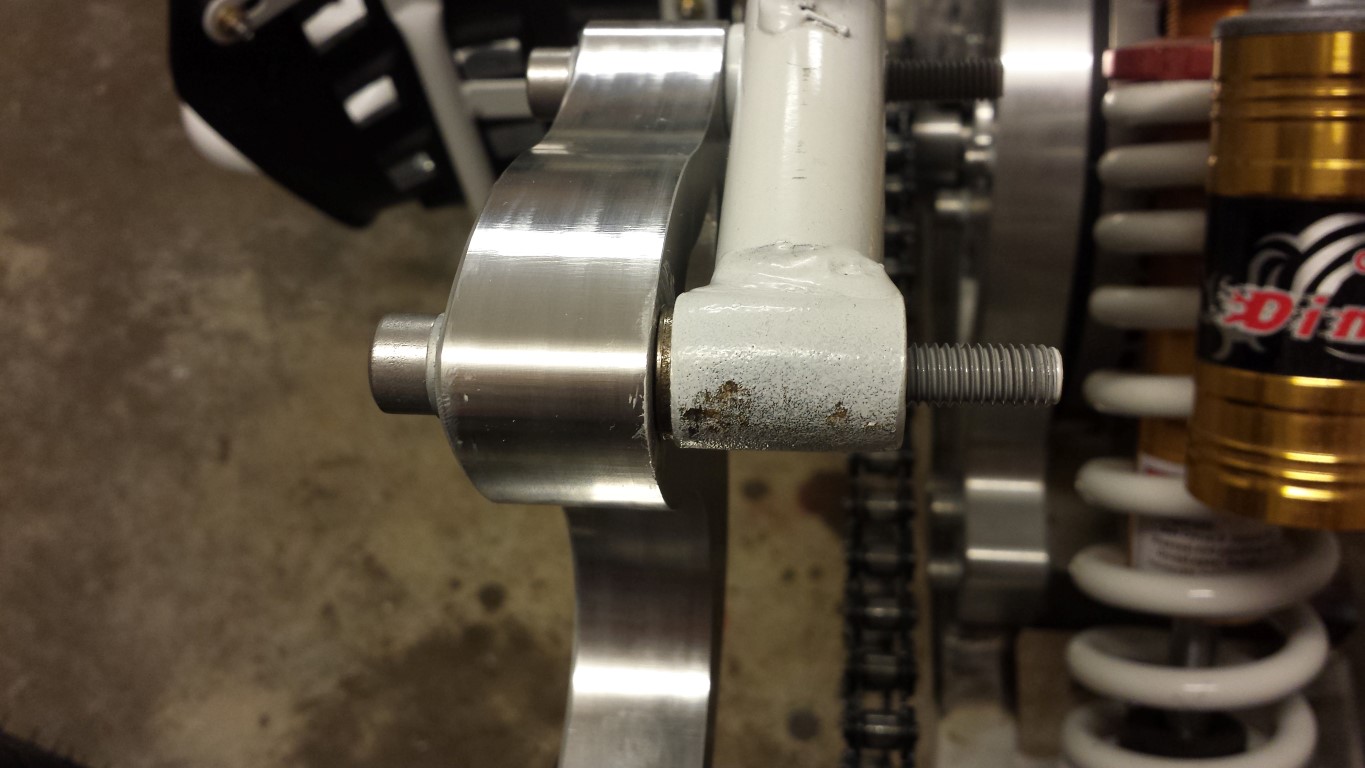
Blog

Posted on 14 September 2013 at 10:00 am (CET)
Category: General
See here the biggest moment of the project up untill now.
It's alive!
Just on low power ofcourse with such small wires, 20V 50A maximum so 1kW. But I didn't really see 50A, think the wires are just too small for that and the 9Ah battery of the quad bike was empty pretty quick.
I also saw that the wheels are quite unbalanced. It could be many things though so I don't know what is causing it exactly. Could be that the rear axle is bent just a little, common problem with Chinese quad bikes. Could also be something with the bearings in the bearing house. And the wheels themselves aren't balanced yet either. It's also a straight axle and there's no weight on it, could be that it's bent a little because of that.
Tomorrow probably with some more power and hopefully a short testride.

Posted on 14 September 2013 at 12:02 am (CET)
Category: Controller
Posted on 14 September 2013 at 12:02 am (CET)
Category: Controller
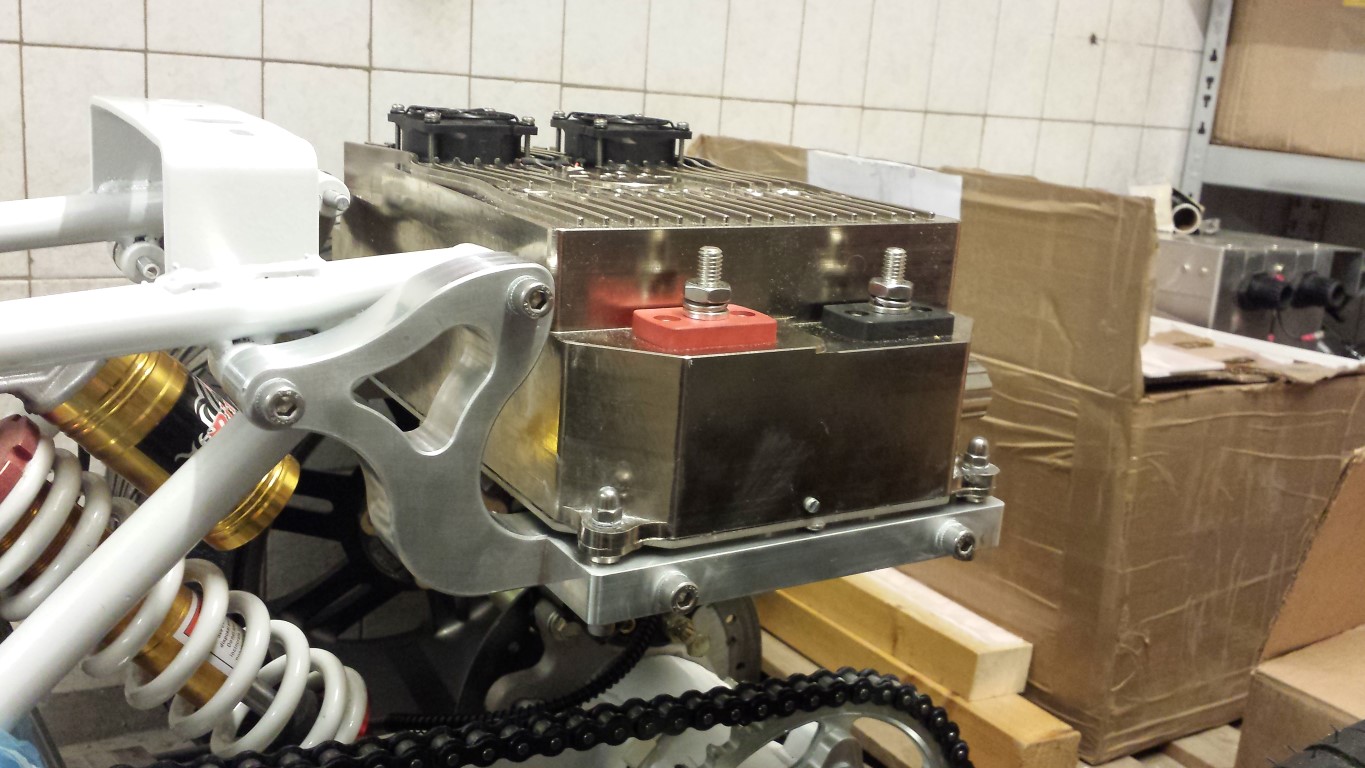
Today I wanted to grind off a bit of those 2 mounting points so the mounts would be sitting straight. But I found out this wasn't possible since those 2 points were already even with the frame. So I found another solution, just adding a ring on the other 2 points and they sit perfectly straight now.
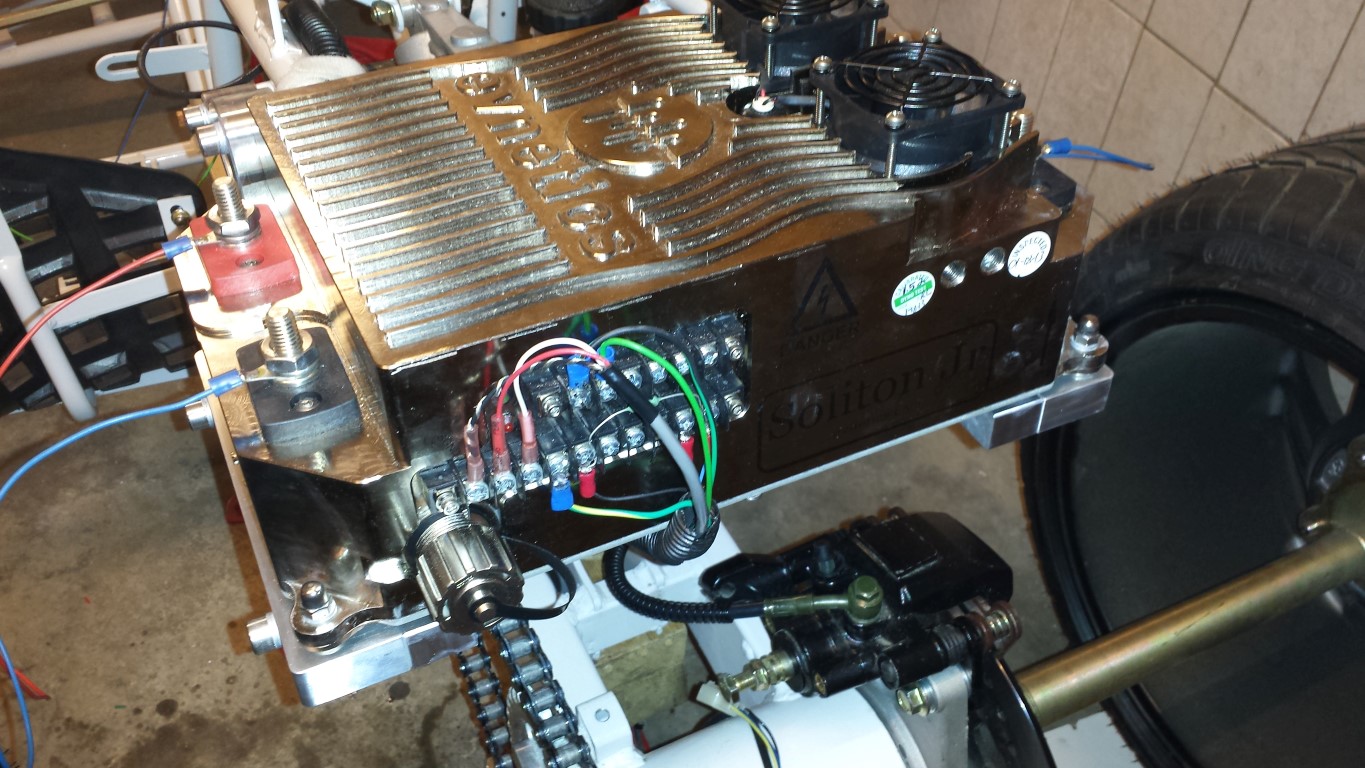
Another picture now everything's really attached. Eventually the aluminium enclosure will be placed around the controller. Can't leave it open like this later on with the lithium batteries, quite deadly if you'd touch the 2 terminals where the cables of the batteries are connected to.

Today I spent most of the time on the wiring to be able to start testing. Cut almost everything out of the old wire harness and tidied it up a bit with a piece of wire loom. Otherwise the wires could cause some problems if they'd hit the chain.
And something else happened today but I'll save that for tomorrow.

Posted on 13 September 2013 at 12:28 am (CET)
Posted on 13 September 2013 at 12:28 am (CET)
Very good news today, the mounts for the controller and a new plate for the RPM sensor are done and also fitted them already. Been working on it for the whole evening. I do have to grind off 2 mounting points on the frame though since the mounts are pointing inward a bit. But it's an easy fix, will do it tomorrow. Couldn't make any noise anymore here so late in the evening.
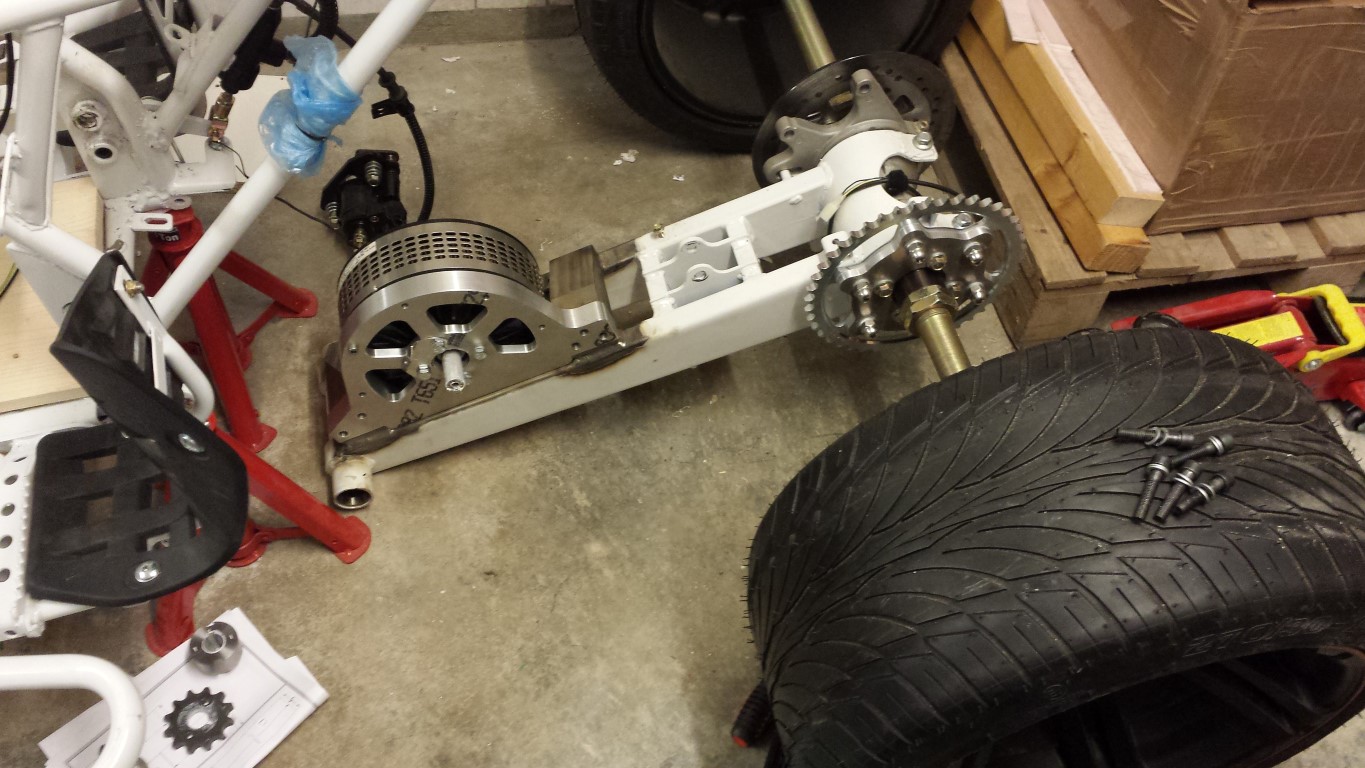
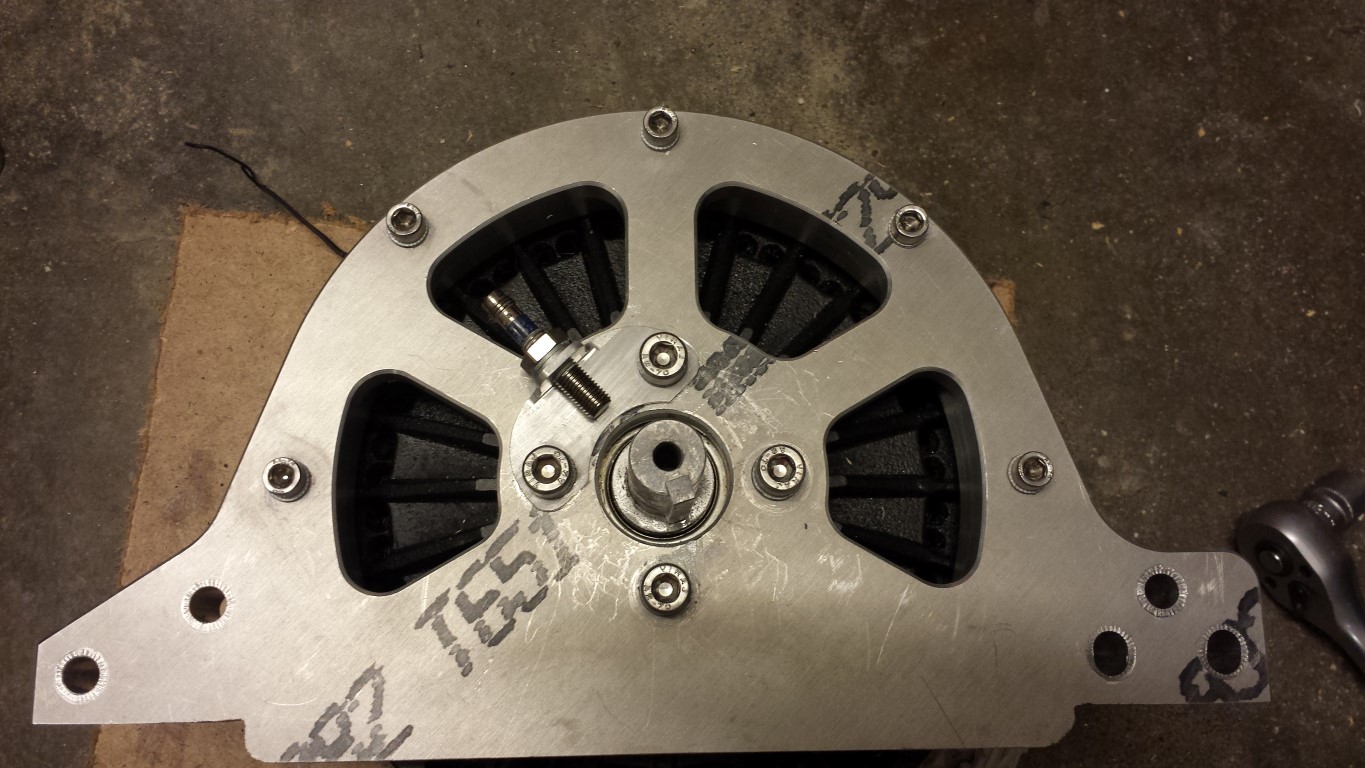
First off I removed the rear swingarm again so I could place all the new stainless steel bolts on the motor mount and to place the new plate for the RPM sensor.
Difference between my own handmade plate and the new plate for the RPM sensor. Makes mine look pretty bad.

Here are all the stainless steel bolts in the motor mount and the plate for the RPM sensor fitted.
The motor back on the rear swing arm, also with the new stainless steel bolts. Looks a lot better than with the black steel bolts which were already rusting.

The inside bolts on the adaptor for the rear sprocket are also stainless steel now. Needed fine metric for this. I think there's a lot of tension on these bolts now though, don't know if this will cause any problems. Apparently they're just a tiny bit thicker than the original bolts or something. Really needed a lot of force to fasten them. Also added the last 2 cap nuts.

And now the mounts for the controller. I'll really keep saying this, great company who made this (Geraets Metaalbewerking). It really turned out very nicely. A lot better looking than the mounts I originally wanted. And it's definately strong enough, I think it can take at least 10x the weight of the controller.

Here you can see it fitted on the quad bike with the controller already on it.

But it's all still loose, I first have to grind off a bit of the 2 front mounting points so the mounts will be sitting straight. Otherwise there will be too much tension on the mounts or the frame if I were to attach it like this. But it'll all be good, another day tomorrow. Here you can see that they're not sitting straight right now.
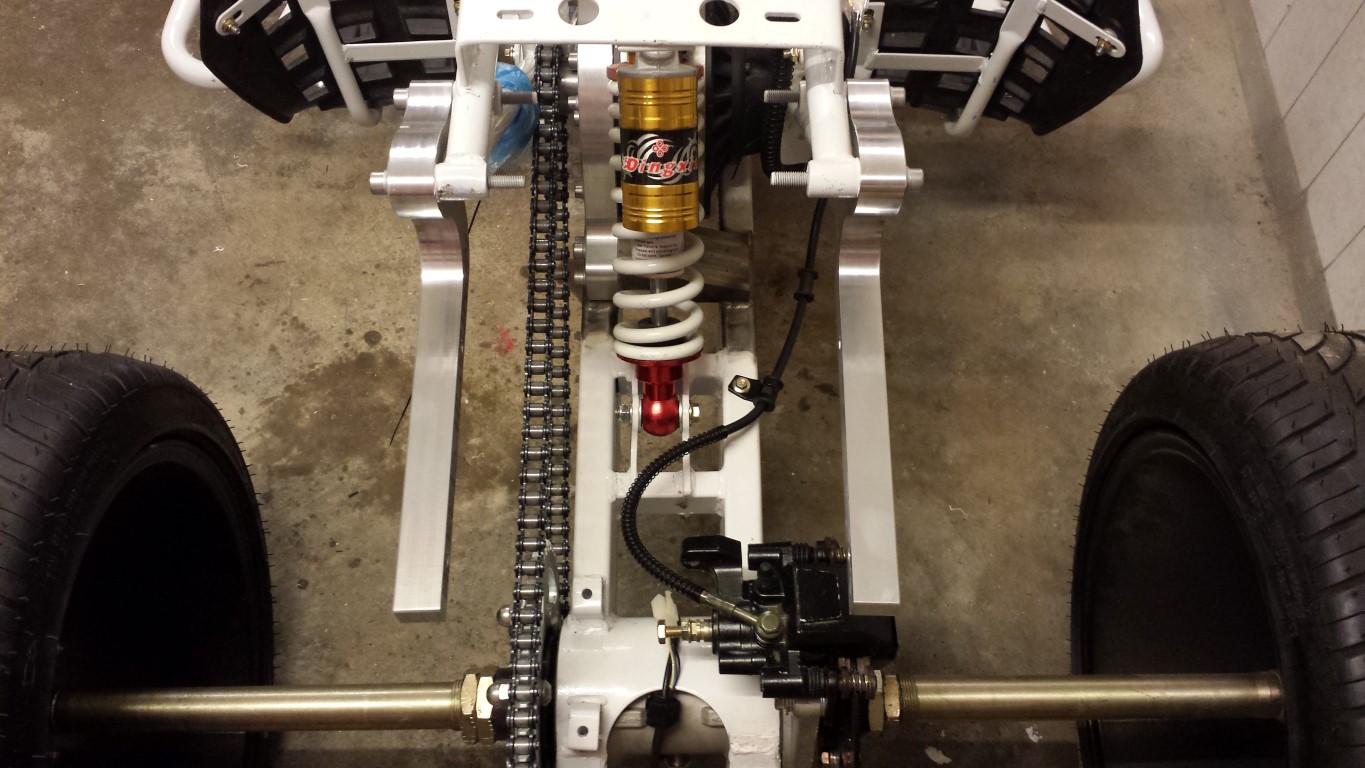
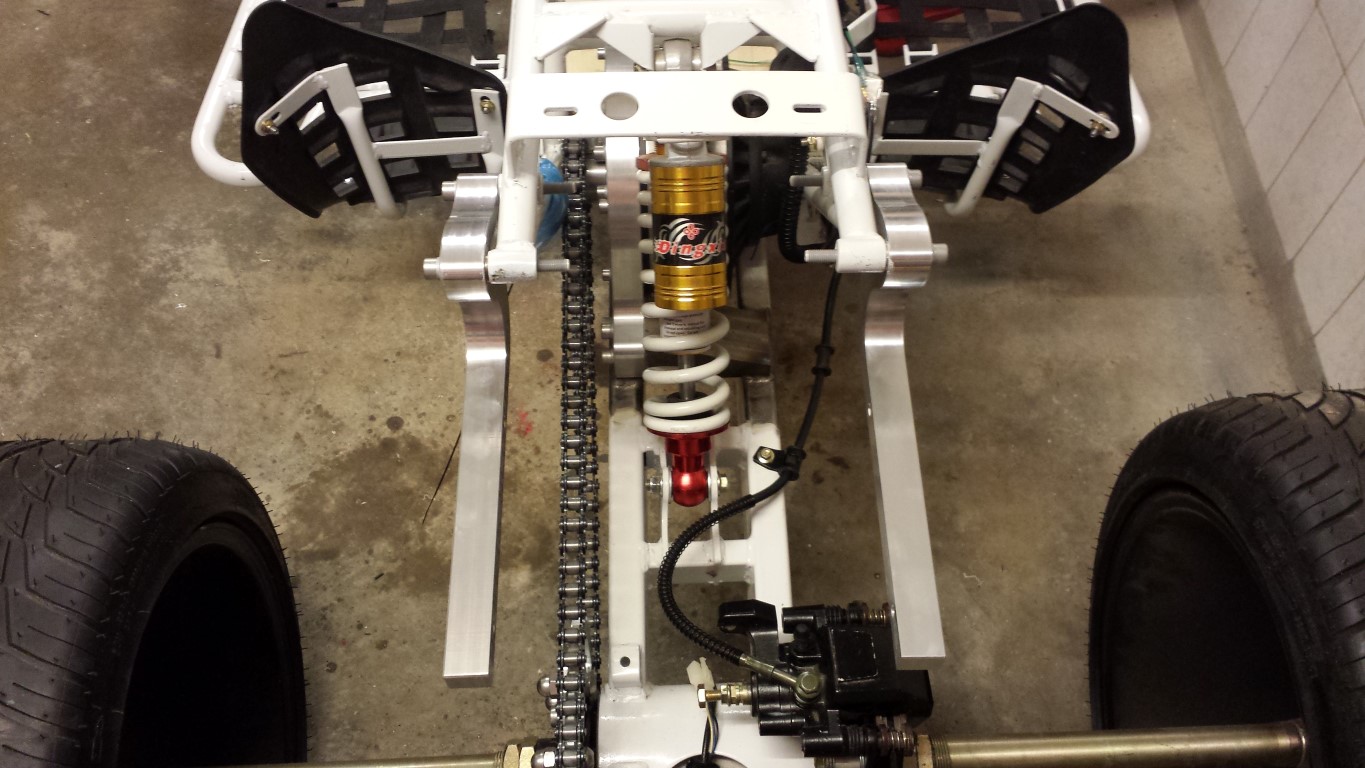
Here's the whole picture again. Rear end of the quad bike is pretty full now.

I also lubed the chain. And the rear swingarm's bearings didn't have much grease on them so I greased them some more. There's still something squeeking near the rear axle though when I turn the wheels, I think the bearings. But I'll be replacing them by SKF bearings anyway so I'll just leave it like this for now.
This weekend I'll definately have my first testride.

Posted on 11 September 2013 at 10:33 pm (CET)
Today I also fitted the nerfbar and hielguards. Even though it won't be going fast, I think it's a bit safer than just having the foot pegs. Also fitted the saddle. Just had to place the rear fender as well otherwise the saddle would bend too much. Don't know how strong it is. Also screwed a wooden board on the frame for the batteries to sit on, just don't think I can fit 2 car battery's on there. But I'll see when it's ready. Also tightened the wheel nuts, almost forgot they were still pretty loose.

And I received some more stainless steel bolts, nuts and rings. Now I just still need the controller mounts.


Posted on 8 September 2013 at 11:03 pm (CET)
Category: General
Today I continued preparing the quad bike for the testride. Temporarily fitted the display so I could at least see the voltage, current etc. while testing.


Works pretty straightforward, just plug in the UTP cable and you're done. There will still be a sensorplate somewhere on a cable of the batteries though.
Also adjusted camber and toe. At least by sight, when it's ready to go on the roads I'll really adjust it by measuring. For just testing on low speed it really doesn't matter, I just didn't like how it looked originally (positive camber and toe out). Would they actually drive the quad bikes like that in China?