
 Nederlands
Nederlands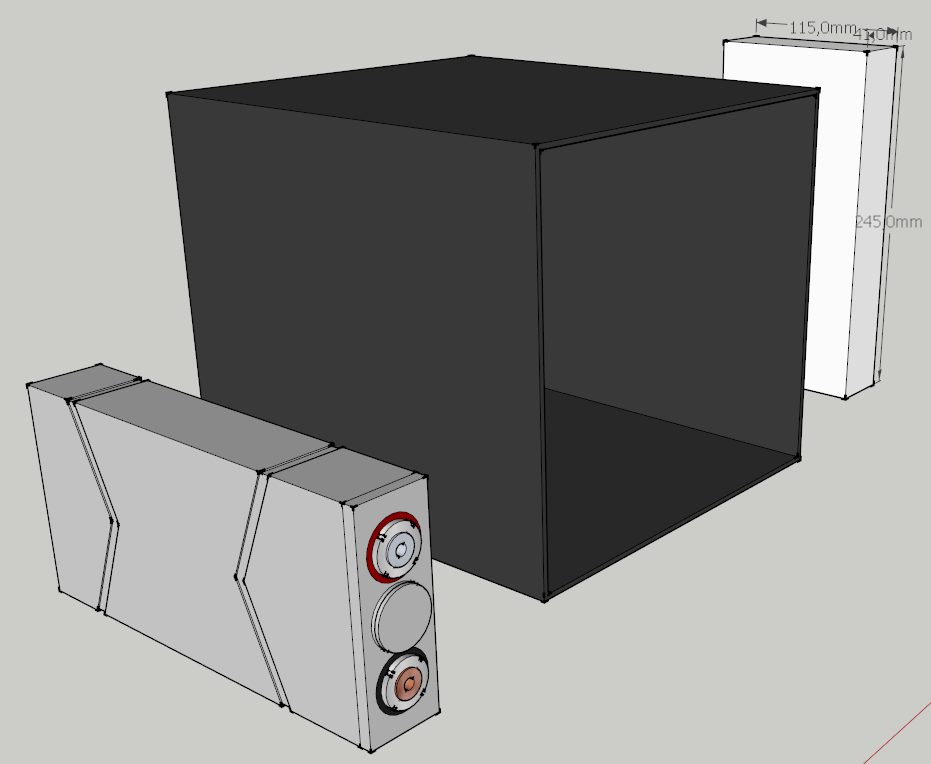
Blog

Was a bit bored today waiting for the plate for the motor mount to arrive. So I played around a bit in SketchUp and replicated the batteries I will be using. Think it turned out pretty well, first time actually using the program.
Also made one of the battery box (the biggest one) in which the batteries will be held together. And I'm in luck, there are 2 sizes given for the width of the batteries on the supplier's website but the smallest size seems to be correct. I always assumed the larger size to be correct. This will give me another 3mm to spare for each battery which is quite a lot really. Will be even easier to place them.
Only problem is I have to make sure they won't be able to move inside of the box. That's why I'm making this 3D drawing, to discover a solution for this.
I also filled up the box with batteries, pretty fun program. Easy to work with.
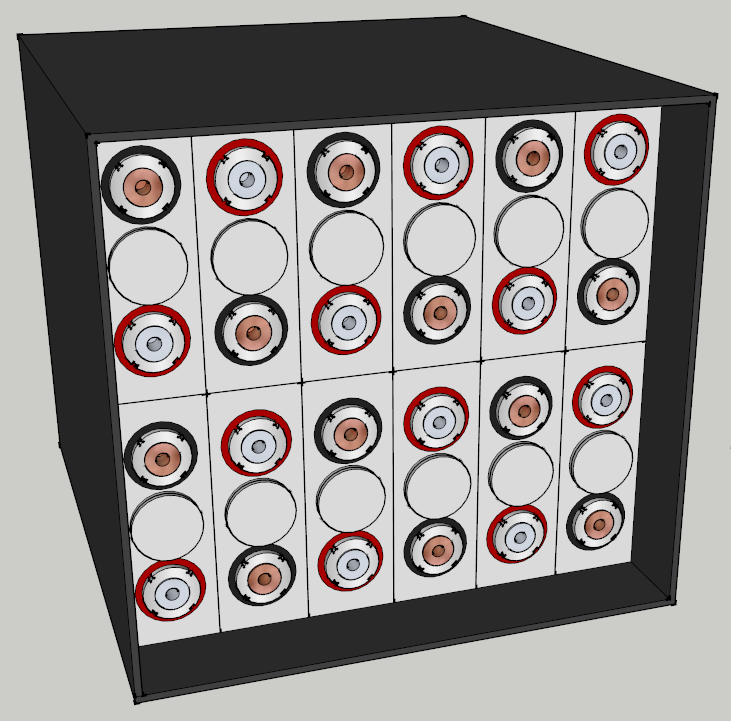
Think I'll continue and add the BMS boards and connections as well.

Posted on 4 April 2013 at 05:10 pm (CET)
Category: Parts
Got something again today, from Belgium this time. It's definately becoming an international quad bike this way.

Blank rear sprocket (530) with 44 teeth. Only still need the holes drilled. My friend who is making the motor mount will also do this so it'll be alright.
I almost have all parts complete now, just a few more small things. And ofcourse the batteries but they should arrive here in 2-3 weeks.

Posted on 3 April 2013 at 10:19 pm (CET)
Today I received the BMS (Battery Management System). Had to get this all the way from America since we don't have anything like this here. Or well, only 3-4x more expensive. Pretty quick delivery, bit less than 2 weeks. Also didn't have to pay much tax for import, way less than expected.
The BMS is there to take care of the batteries so you can't under- or overcharge (very important for lithium batteries). The batteries also get balanced while charging so that you can get the maximum capacity out of them for a bit higher range.
Here you can see the whole system. All the small printboards will come on each of the batteries and are connected in series. I ordered a few extra just in case I'd destroy one making a wrong connection.

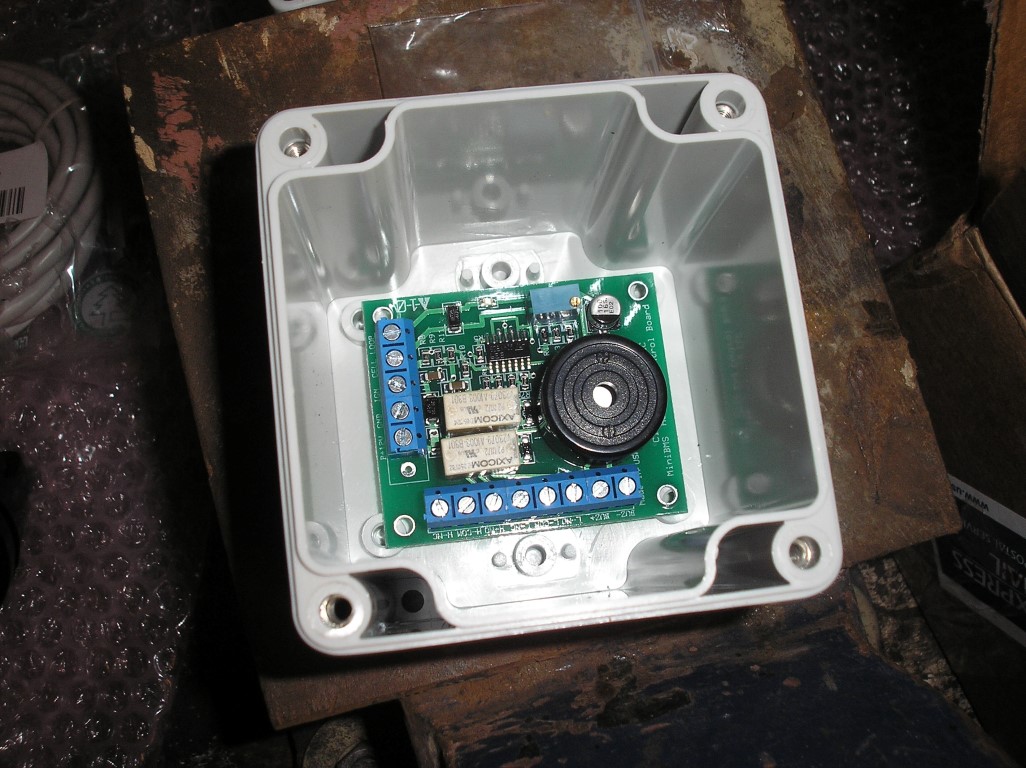
On bottom left is the head-end board as they call it. The whole loop of battery boards will be connected to this and this one basically manages everything.
In the middle is a sensor that can measure the current, voltage, temperature and some more things. It sends all this information to the display you can see on top right. On this display you can also see the capacity of the batteries.

Head-end board coincidentally fits in the small box that I got with the charger. This was actually meant for the little relais but I can place this in there as well now.
Last week I still got some more parts, will post them here as well since it's all part of the project.

Black cable glands in trade for the wrong gray ones. Rubber insulator caps for the terminals of the controller and motor. Some more cable shoes with different sizes (will still have to order more of the big M6 ones since the batteries also need M6 instead of M10). Orange heat shrink only for color coding on the black cables I received for the charger and DC-DC converter since this is also high voltage.
Then there's still a small charger that can charge one 3.2V lithium battery at a time. I will need this to charge all of the batteries for the first time to get them balanced. The batteries will all be connected in parallel for this. After that the BMS will keep them balanced. Came all the way from Czech Republic, just can't get these things here. This won't be fitted to the quad bike but it does make sure the batteries are immediately ready for use.
Also 2 steel blocks. I will have these routed together with the motor mount so they'll get a bit smaller, sloped and lighter. After that I can get them welded on the rear swing arm and the motor mount will be attached to these blocks.
The plate for the motor mount is also ordered already. It was pretty hard to find the correct size. I again couldn't find it here so I ordered it in Germany.

Posted on 25 March 2013 at 12:49 am (CET)
Category: Drawings, Electric motor
Posted on 25 March 2013 at 12:49 am (CET)
Category: Drawings, Electric motor
A while ago a friend of mine came by, he is in the metalworking business. Together we went looking for the best solution to mount the motor and if he could make a mount for it. He already had a few ideas but he would go and make a drawing of it first. Ended up being a few drawings since a few modifications had to be made.
Meanwhile I received the final drawing and I'm checking if it can actually be fitted this way. First off, here's the drawing.
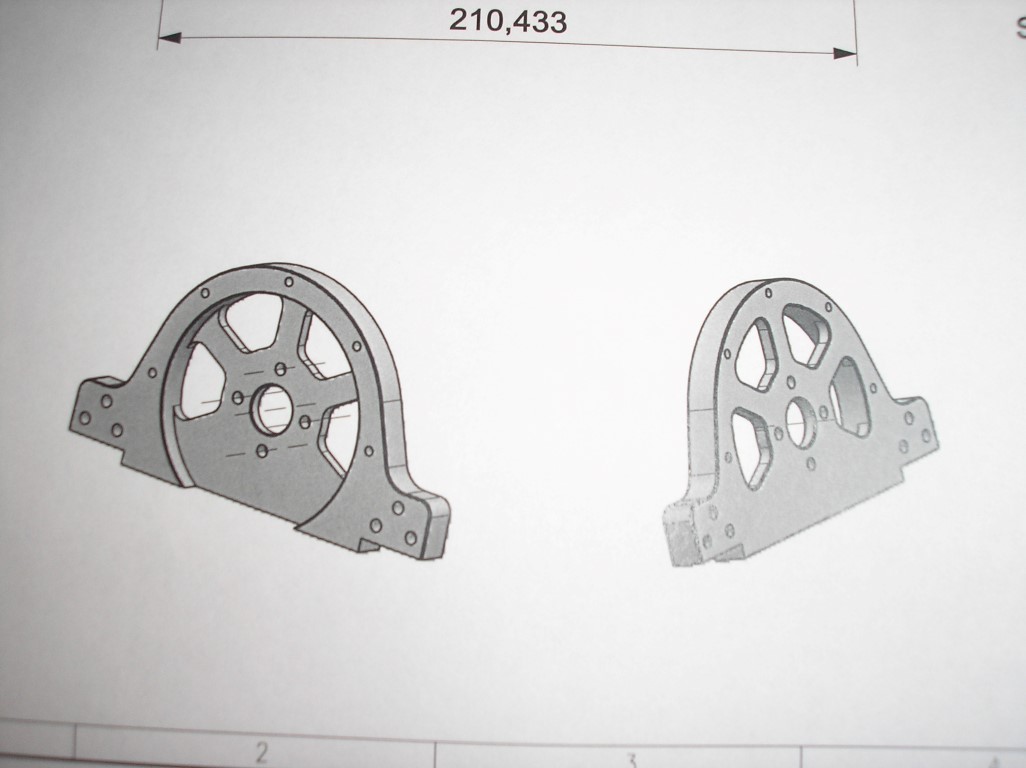
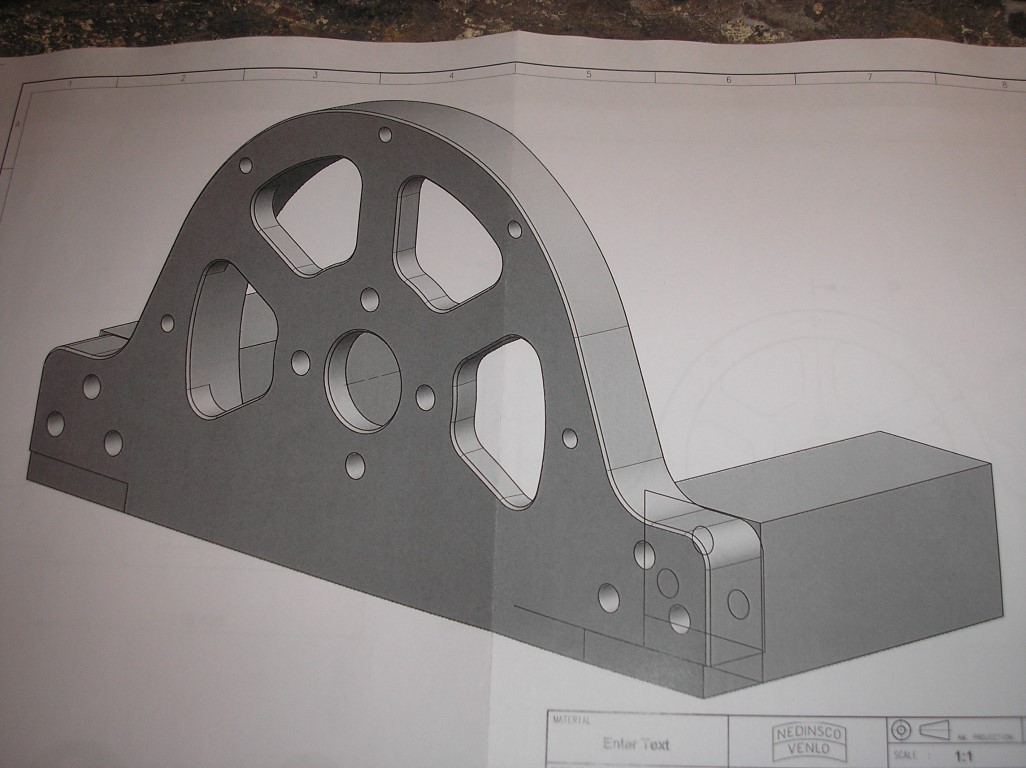
The 2 blocks that you can see will be welded on the rear swingarm.
Here you can see where the motor will be placed. As you can see there is no need for modifications with the suspension, it fits perfectly in there.

And I again made a paper model to see if the motor mount would fit. Still think it's the best way to measure.

Only on the bottom left it will get a bit more sloped and only 2 mounting holes for mounting on the swingarm since the frame on the left side of the motor is in the way.

The motor mount can be made now. Will have to get the materials myself first, after that it would probably take around 2 weeks to make it. It'll probably become the best looking part on the quad bike.

Posted on 9 March 2013 at 10:06 pm (CET)
Category: Controller, Electric motor
Posted on 9 March 2013 at 10:06 pm (CET)
Category: Controller, Electric motor
Today I made a test setup to check if the controller and motor work well. First I setup the controller on my computer, very easy to do and can't really set anything wrong because of the clear descriptions. I then cut some cables out of the old wire harness, didn't really have anything else to use. To be sure I also added the keyswitch so I could turn it on and off.

Thankfully everything worked perfectly. Also made a short video so you can see the motor spinning. When turning on the controller you always have to wait before you can control the motor because the capacitors are being charged up. If this wouldn't happen and they directly get high voltage it could damage them. After this is done the contactors (big relais) close, the motor can be controlled and you can 'drive'.
Sorry it's so short, had a bit more footage but something went wrong with filming. By the way, this is with 2 12V batteries in series, so 24V. But in the controller I set a limit for the motor of 13V 10A. Did this because I wasn't sure the small Chinese wires I used would survive with higher voltage and current. But I must say I'm impressed, it was already pretty hard to keep the motor in place with 1 hand when I fully opened the hall sensor, already noticed the torque quite well. I did see 16V going to the motor and 18A so the limit isn't working perfectly. So this was 288W (0,288kW). Still hard to imagine how it'll be like with 25+kW but it's looking good.